
Szach-mat wykonany magiczną ręką: systemy liniowe od igus umożliwiają przesuwanie figur szachowych
Studencki projekt „Chess Buddy” umożliwia rozegranie partii szachów bez przeciwnika przy użyciu systemu liniowego o niskich drganiach od firmy igus.
Szachy to jedno z najbardziej popularnych ćwiczeń umysłowych, a teraz przyjemność z rozgrywania partii czerpać będzie można nie tylko poprzez grę z przeciwnikiem, ale również samemu. W projekcie „Chess Buddy”, będącym częścią pracy dyplomowej, Sebastian Jahn oraz Julian Krydl opracowali nową generację robota przystosowanego do gry w szachy. Roboty te w bezpośredni sposób odpowiadają na ruchy przeciwnika - człowieka i same niezależnie od niego przesuwają figury. Napędzane silnikiem, wewnętrzne części Chess Buddy składa się z dwóch aluminiowych wałków o wysokiej precyzji, na których bezsmarowne łożyska ślizgowe drylin R umożliwiają płynne i ciche przesuwanie figur szachowych za pomocą elektromagnesu.
Rozegranie partii szachów od zawsze wymagało obecności dwóch graczy. W przypadku braku jednego z graczy, projekt „Chess Buddy” opracowany przez Sebastiana Jahn'a i Juliana Krydl'a może przyjść z pomocą. W centrum technicznym Szkoły Mechatroniki opracowali oni robota przystosowanego do gry w szachy - projekt ten stanowił część ich pracy dyplomowej. Celem ich projektu było zaprojektowanie robota zdolnego do przesuwania figur na szachownicy, jak również rozpoznawania ruchów wykonanych przez człowieka oraz wycofania się z błędnych ruchów. Studenci sami podjęli się zarówno opracowania jak i budowy robota. Podczas procesu budowy inżynierowie zdecydowali się zamontować robota pod szachownicą.
Prowadnica liniowa drylin zapewnia ruchy wykonywane przez magiczną rękę
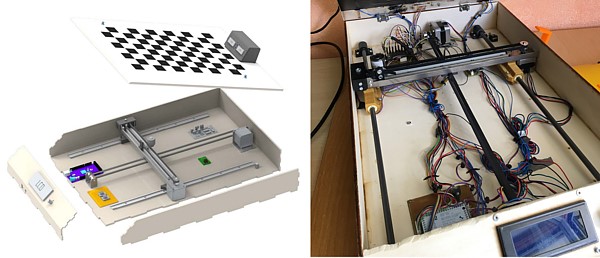
Zdj. Szybkie i ciche procesy wykonywane przez Chess Buddy, automatycznego robota przystosowanego do gry w szachy, zagwarantowane są przez aluminiowe wały drylin o dużej precyzji oraz bezsmarowne łożyska ślizgowe igus.
Aby umożliwić przesuwanie figur szachowych, Julian Krydl oraz Sebastian Jahn wybrali te zawierające magnes. Główną zaletą jest możliwość umieszczenia ich za pomocą elektromagnesu pod szachownicą w dwuosiowym systemie liniowym. Po pierwszym użyciu głośnych prowadnic recyrkulacyjnych łożysk kulkowych stosowanych w systemach liniowych, Sebastian Jahn zwrócił się o wsparcie do młodych inżynierów (Young Engineers Support) z igus. Wynikiem wspólnej pracy pomiędzy młodymi inżynierami a mobilną grupą wsparcia od igus była decyzja o zastosowaniu aluminiowych wałków o dużej precyzji z łożyskami polimerowymi drylin RJMP. Zapewniają one płynną i delikatną pracę ze względu na brak konieczności ich smarowania. Silnik krokowy Nema 17 napędza system liniowy. Aby rozpoznać rodzaj ruchu wykonanego przez przeciwnika, Chess Buddy odczytuje je za pomocą czujników Halla. Czujniki te wykrywają, czy magnes jest umieszczony na polu, czy nie, a następnie obliczają trakcję. Kolejne szachowe ruchy robota są sterowane przez program komputerowy i realizowane przez układ liniowy. Poziom trudności może być dostosowany do poziomu umiejętności człowieka, co sprawia, że robot przystosowany do gry w szachy idealnie sprawdza się jako partner treningowy.
Poniższy film przedstawia zasady działania Chess Buddy.
Źródło: igus GmbH